
PARGE® Rectification and Geocoding Method
PARGE: Overview | Background | Features | Method | Results | Screenshots
The data acquistion by airborne and drone based scanner systems never is as stable as the behaviour of sensors on spaceborne platforms. Thus, geometric distortions occur due to variations of the attitude (given by roll, pitch and heading angles) of the plane in combination with the aircraft position.

Raw Headwall Nano (drone based) image acquisition with distortions due to angular motion.
Such distortions can not be easily corrected by ground control point based traditional georeferencing procedures, since the almost arbitrary aircraft movements can not be approximated satisfyingly by polynomial transformations of the image. A line-or even pixel-wise calculation has to be performed instead, to consider the behaviour of the plane. The parametric processor starts with a 'theoretic view angle vector' (L), oriented from a horizontal plane faced to direction north. This vector has to be turned in three dimensions to get the 'effective view angle vector' (Lt).
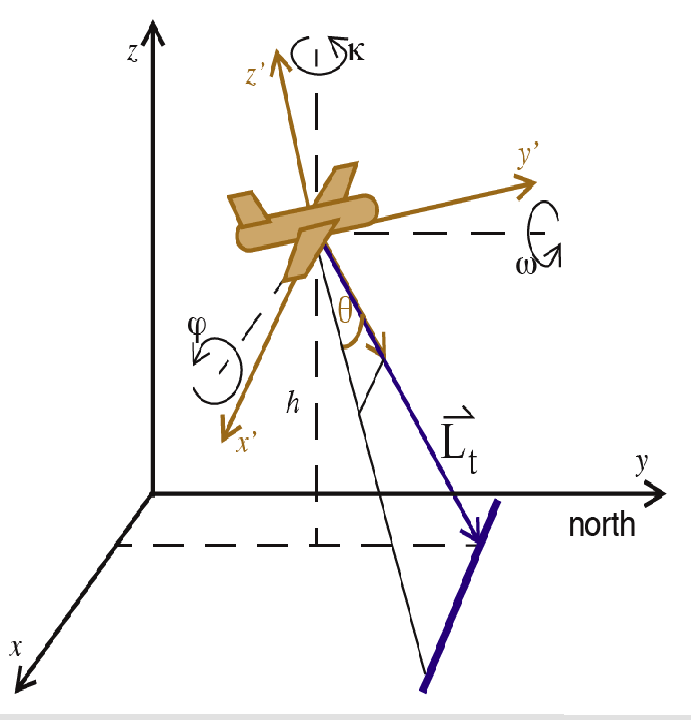
The Transformation of the theoretical view angle vector
L to the effective look angle vector Lt.
r, p and h denote roll, pitch and true heading angles
respectively.
For an exace direct geometric ortho-rectification a variety of input data is required. Often some parts of this data are not known exactly and must be estimated or interpolated from external sources. The three categories of input data are: Navigation data, consisting of location (longitude, latitude, height) engineering data (roll, pitch and true heading), and the sensor interior orientation (ie., the geometric sensor model). Navigation and Attitude information needs to be exactly synchronized to the image lines.
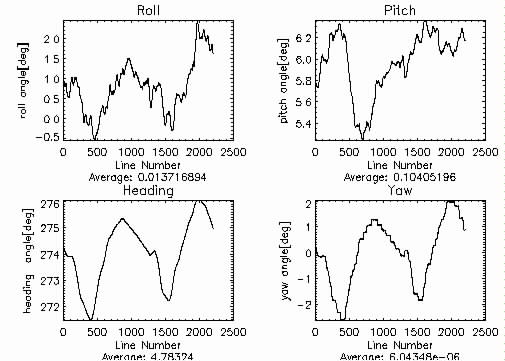
Typical attitude Data of an airborne scanning imaging spectrometer
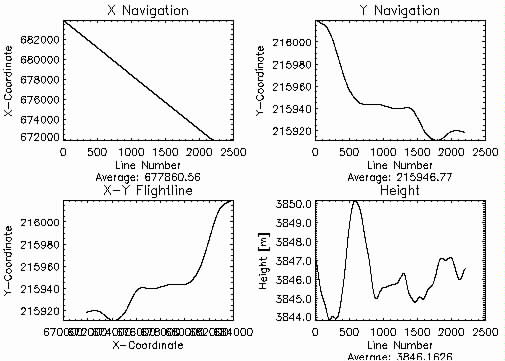
Typical navigation data of an airborne scanning imaging spectrometer
PARGE calculates not only the distortions due to sensor movements but also performs a forward intersection of the pixel geometry to the digital elevation model. A variety of resampling methods from linear interpolations to nearest neighbour techniques as well as non-resampling raw geometry based processing is supported for the final processing steps based on PARGE.